Back
Gram-Space Manifold Muon
Summary
Recently, Bernstein and Thinking Machines introduced a Muon variant that constrains weights to the Stiefel manifold. We recap that construction and propose two variants derived by relaxing the Gram-matrix constraint in two different ways. We argue that designing many manifold-constrained optimizers is naturally phrased in terms of the Gram matrix.
.gif)
Introduction
Modern first-order optimizers can let weight matrices drift into poorly conditioned regimes, amplifying gradient noise and forcing conservative step sizes. Muon mitigates this by orthogonalizing updates, but the weights themselves remain unconstrained. Manifold Muon takes the next step by constraining each linear layer to a geometry—e.g., the Stiefel manifold—so singular values of both the update matrix and the weight matrix are controlled by construction.
In this post, we explore whether this strict constraint can be relaxed. We begin by recapping the original manifold Muon optimizer, then derive two variants by selectively relaxing the constraints on the weight matrix's Gram matrix . Finally, we propose a single, unified framework for designing Gram-space optimizers.
We show how this framework can systematically generate a family of related manifolds—including the Stiefel manifold and its simple relaxations—which inherit the same efficient dual solution and fast computation.
(Manifold) Muon Recap
Muon[1][2] orthogonalizes weight updates to keep linear layers well-conditioned. Recently, Jeremy Bernstein and Thinking Machines released an insightful post[3] in which they introduce a version of the Muon optimizer where the weights of the network are constrained to the Stiefel manifold:
Given a gradient matrix , the "manifold Muon" problem solves
where the spectral-norm bound controls update size and the second constraint enforces to lie in the tangent space
Note in particular that both the Stiefel constraint and the tangent constraint are natural generalizations of the hyperspherical constraint and its tangent constraint.
As a smooth manifold, we have
and one can think of as the set of orthonormal -frames in .
As nicely detailed in [4], in order to solve problem (1) one introduces a matrix and forms the Lagrangian
where the angle brackets denote the Frobenius inner product . By a minimax swap and the fact that
where denotes the matrix polar factor: if is an SVD, then (zeros on singular-zero directions)1. One then shows that (1) admits the dual problem2:
where the nuclear norm is the sum of the singular values. This problem is then solved by gradient ascent, where a subgradient3 of this dual objective is then given by
where .
A couple of remarks about this derivation:
- Note that although we introduce a full matrix of Lagrange multipliers , in fact only actually mattered, so it would have been sufficient to take to be symmetric.
- When formulating the manifold Muon problem, there are two size constraints: an explicit size constraint on the size of the update matrix , and a kind of implicit constraint on the weight matrix (namely that it has unit condition number).
In the next section, we will obtain a different manifold Muon-style optimization problem (though the process of solving it will be remarkably similar to the above). To do so, we will relax the unit condition number requirement.
Manifold Muon in Gram Matrix Space
The Stiefel constraint is in fact just one constraint that one can put on the Gram matrix of a collection of vectors. Let be vectors in arranged as columns of . The Gram matrix is then
The Gram matrix encodes the geometry of the column vectors of . Its entries tell us everything about their lengths and the angles between them:
- The diagonal entries () are the squared lengths of each column vector.
- The off-diagonal entries () are the dot products between different columns, measuring their orthogonality.
Using this view, we can equivalently define the Stiefel manifold as (ordered) collections of vectors in whose Gram matrix is the identity matrix.
With this view in mind, we introduce two relaxations of the Stiefel constraint, each obtained by relaxing one aspect of the identity requirement :
- Diagonal Gram: Require off-diagonal entries to vanish (orthogonality), but allow diagonal entries to vary (non-unit norms).
- Oblique: Require diagonal entries to equal 1 (unit norms), but allow non-zero off-diagonal entries (non-orthogonality).
Diagonal Gram Manifold Muon
We first consider allowing the Gram matrix to be an arbitrary diagonal matrix. Define4
Strict positivity of the is needed for to possess the structure of a smooth manifold. In fact, we have an explicit diffeomorphism
Moreover, as
we obtain
so we gain additional degrees of freedom relative to .
One can then show that the tangent space at is
where is the operator that projects to the off-diagonal part of a matrix. In other words, must be diagonal.
For gradient and Lagrange multiplier , the analogous Lagrangian is then
Note by self-adjointness of the operator, it actually suffices to only consider symmetric with zero diagonal.
As in the Stiefel case, one then proceeds by solving the analogous dual formulation
and obtains the following subgradient
Note the similarity in form to the original manifold Muon solution.
Oblique Gram Manifold Muon
Alternatively, we relax the orthogonality requirement while maintaining unit norms. Define
where "oblique" comes from the fact that columns have unit norm but can be mutually oblique (not orthogonal).
In fact, is diffeomorphic to by simply mapping each column to a point in , and hence the manifold has dimension . In this case, the tangent space is given by
The corresponding Lagrangian is then
The dual problem takes the same form:
and we obtain the subgradient
.gif)
A Unifying Theme
In fact each of the three examples above are really instances of the following more general setup.
Let denote the space of symmetric matrices, let
be a self-adjoint linear projector (i.e., and ), and let be some class of symmetric matrices.
Given , it follows that lies in , and lies in .
Then each of the optimization problems above is a special case of the following family of manifolds:
Some observations:
- It is sufficient to consider to have domain since we could otherwise just precompose with the map.
- For any symmetric and matrix , we have since for any .
Moreover, each of the components of the above problem have a completely general form5:
Tangent space:
Lagrangian:
Dual problem:
Subgradient:
The derivation shows that for any self-adjoint projector , the inner minimization over the spectral-norm ball always yields the same nuclear-norm dual with subgradient (the polar factor), so the exact same Newton–Schulz/Polar-Express routine applies—there is no new solver to invent for each choice of .
For example, the three instances above correspond to specifying as follows:
- Stiefel: , .
- Diagonal-Gram: , .
- Oblique: , .
In particular, we would offer that it may be easier to search for the ideal constraint manifold by instead contemplating what the correct set is.
Results
We follow the experiment from the modular manifolds post[3]. We compare four optimizers—Adam[5], Stiefel–Muon, DGram–Muon, and Oblique–Muon—sweeping learning rates over 1e-3, 3e-3, 1e-2, 3e-2, 1e-1, 3e-1, 1e1, 1e2.
The figures below summarize train/test accuracy and show the singular-value spectra of the best run per method.
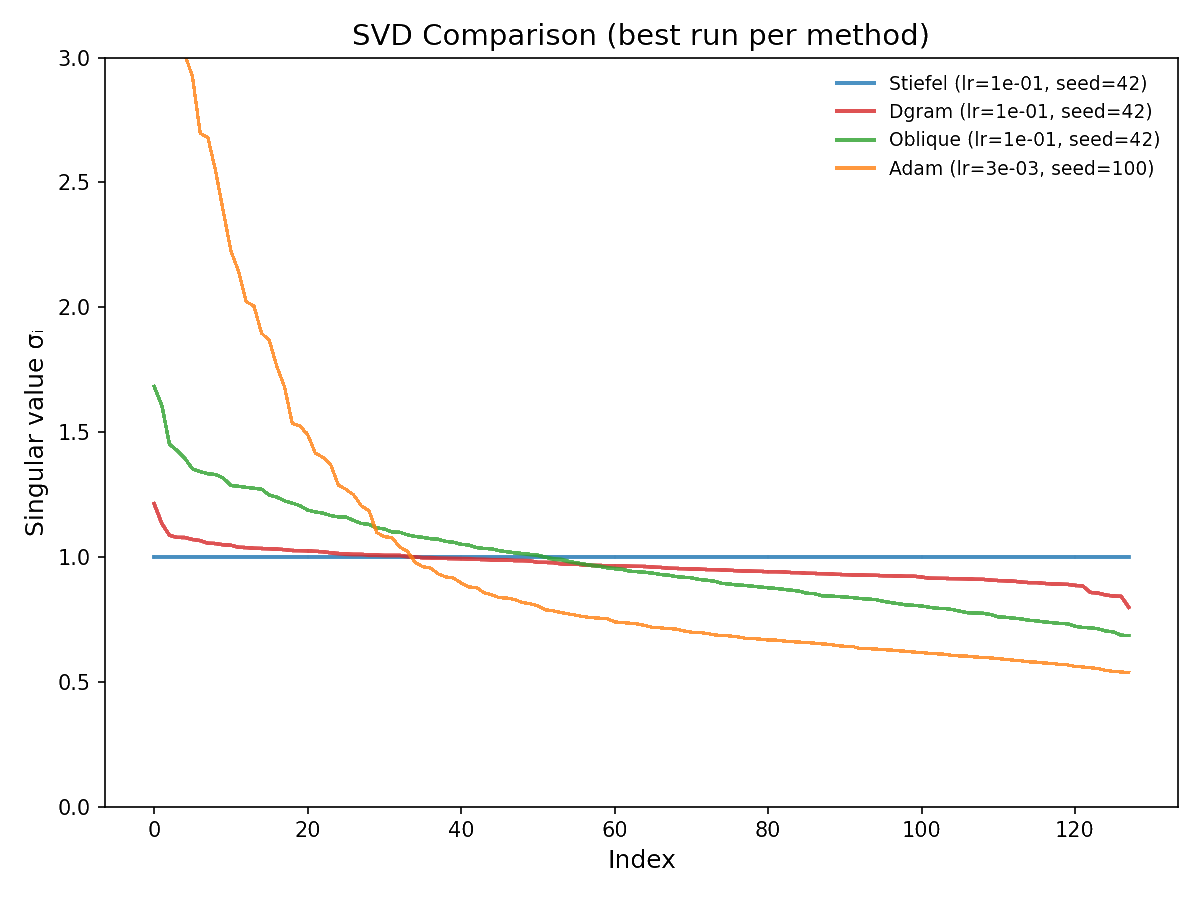 Figure 1: SVD statistics across optimizers.
Figure 1: SVD statistics across optimizers.
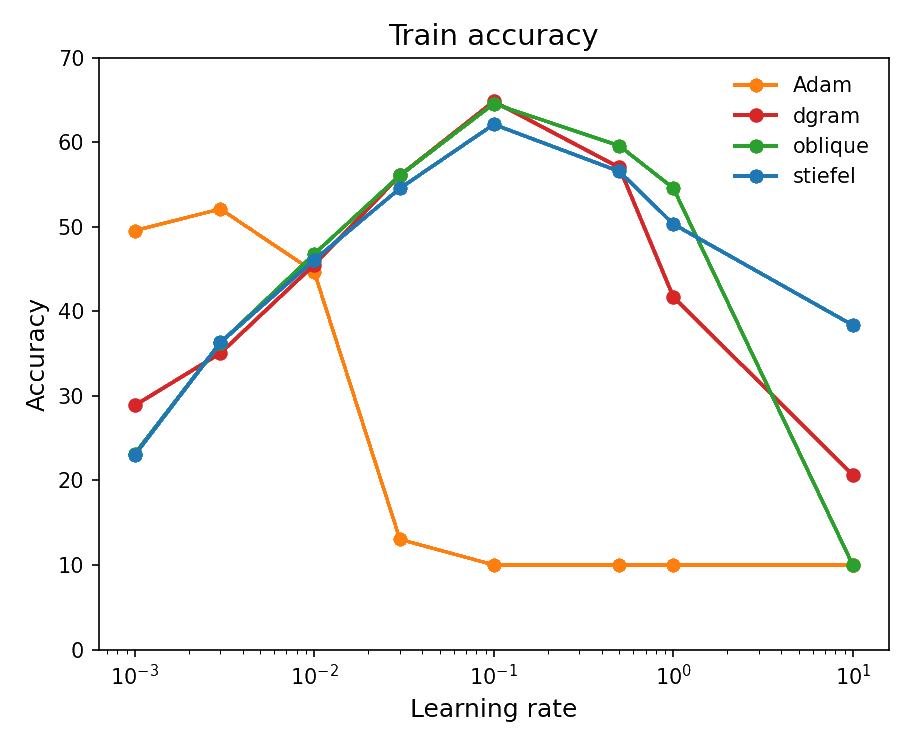 Figure 2: Train accuracy across learning rates.
Figure 2: Train accuracy across learning rates.
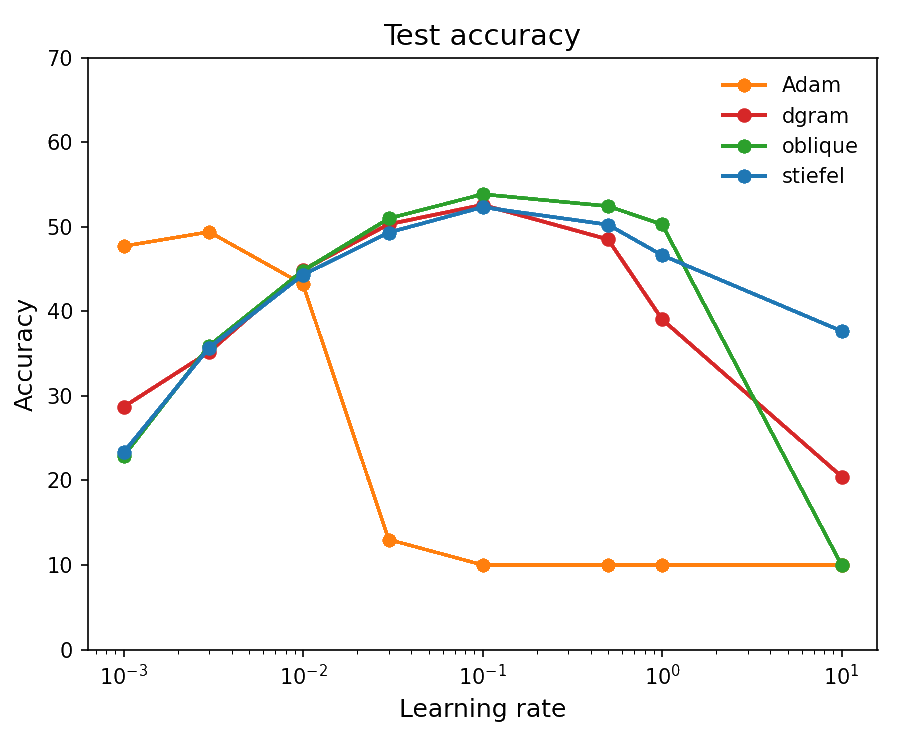 Figure 3: Test accuracy across learning rates.
Figure 3: Test accuracy across learning rates.
The results reveal an interesting spectrum of conditioning behavior. As expected, Stiefel–Muon maintains condition number 1 by construction. The DGram and Oblique variants exhibit more spread in their singular value distributions, yet still maintain substantially better conditioning than Adam.
It would be very interesting to see if this result scales in any way. That is, it is not obvious to us that one always wants all of the singular values of a weight matrix to be 1, as is the case for the Stiefel manifold. Adam likely induces far too much variance in the singular value distribution, but allowing slightly more "wiggle room" centered about 1 seems plausible—it could give the model a bit more freedom to privilege certain directions while still maintaining good conditioning. For instance, one could even have a "weight decay"-like term that penalizes deviation from 1.
Probing the loss landscape of our MLP over time through random projections reveals a similar intuition. Unlike Adam, DGram and Oblique seem to find smoother, more stable valleys in the loss landscape. Compared with the more constrained Stiefel muon, they then descend faster into the minima. Slightly weakening the orthonormality constraint offers a strong balance of regularization (to find flatter basins) and power (to converge quickly when a basin is found).
Takeaways
Optimizer design involves two complementary choices: selecting the right geometry for gradient descent (via an appropriate norm), and choosing the right manifold to constrain weights to.
We showed that the Stiefel Muon optimization problem extends to a broader family of manifolds parameterized by self-adjoint projectors on the space of symmetric matrices and constraint sets . The solution method—passing to a dual problem involving the nuclear norm—remains structurally identical across this family.
This suggests that manifold selection might be more naturally approached through Gram-space design: rather than directly specifying geometric constraints on , we can work in the space of Gram matrices and choose which geometric invariants to constrain via and .
Acknowledgments
In addition to the post this work is based on, there are some other very[6] nice [7] posts on the topic of manifold-constrained optimizers.
References
- Bernstein, Jeremy (2024).
- Jordan, Keller et al. (2024).
- Bernstein, Jeremy (2025).
- Bernstein, Jeremy (2025).
- Kingma, Diederik P. and Ba, Jimmy (2014).
- Cesista, Franz Louis (2025).
- Su, Jianlin (2025).
Footnotes
-
Equivalently, is the polar factor in ; with SVD it reduces to (with zeros on null singular spaces). In practice we compute efficiently via Newton–Schulz or Polar-Express iterations, avoiding an explicit SVD. ↩
-
For the full details on the argument, see [4]. ↩
-
One must use subgradients here because the nuclear norm is convex but not everywhere differentiable ↩
-
In practice you may want bounds on the diagonal entries, e.g. with , to avoid degeneracy and runaway scaling. ↩
-
One also has a closed form for retraction maps (which depend on ) for this general setup. ↩